電気通信大学は14日、5指独立駆動型のサイボーグ義手の開発と実用化に成功したと発表した。厚生労働省の補装具等完成用部品として認可されており、公費支給により利用者に届けられる。このシステムには個性適応学習機能を搭載しており、利用者の筋電パターンと手指運動パターンを後天的に対応づけることで自在にコントロールが可能だ。
筋電(表面筋電位)とは、脳の命令により筋肉が収縮する際に発生する微弱な電流のこと。この筋電を電極で採取してモーターのスイッチとして利用する義手を筋電義手という。これまでに国内で公費支給されてきた筋電義手は海外製品が主で、コストが高いこと、機能的な制限により自由に追加機能の開発を行なうことが困難なことが課題だった。今回認可されたサイボーグ義手は電気通信大学で人工知能とロボット技術の研究に取り組む情報理工学研究科の山野井佑介特任助教らが開発を進めてきた。
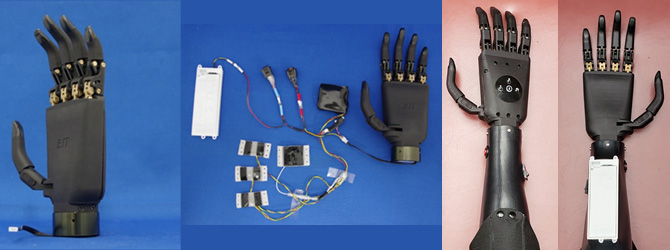
この義手システムでは筋電センサの情報をマイクロコントローラを介して5指ロボットハンドに伝達する。システムには個性適応学習機能が搭載されており、パターン識別機能を用いることで、筋電信号の周波数強度パターンと義手の手指動作パターンの対応関係を後天的に獲得することができる仕組みだ。
病院での3か月間のフィールドテストにより日常生活で有効に機能し被験者の生活向上に寄与するとの評価結果を得て、厚労省による認定登録に至った。これまで電動義手で完成用部品に登録されているものは国外製大手3社のものと2018年に同研究グループが開発したもののみで、国産義手としては今回が2例目。適応学習機能を搭載したものは初めて。
このシステムは自由に追加機能の開発が可能なため、今後の機能向上にも期待できる。
写真提供:電気通信大学(冒頭の写真はイメージ)